CHAPTER 7 Lower limb motion during walking, running and jumping
Joint movements
Hip joint
In single leg standing, vertical compression forces of 1.8–3.0 times bodyweight have been recorded at the hip, while in the stance phase of walking, forces between 3.3 and 5.5 times bodyweight have been measured. In running, the forces are higher still. Although the major force on the hip is vertical, anteroposterior forces (AP or ‘shearing’) are still present. At heel-strike and toe off, the AP forces acting on the hip actually exceed bodyweight (Palastanga, Field and Soames, 1998).
Knee joint
During walking, forces between two and four times bodyweight are taken by the knee. Peak forces correspond to hamstring, quadriceps and gastrocnemius contraction, and occur at heel strike and during propulsion. In jumping, forces may approach 24 times bodyweight on the knee (tibiofemoral) joint and 20 times bodyweight on the patellofemoral joint (Palastanga, Field and Soames, 1998). When walking down stairs, the intense eccentric activity in the quadriceps results in joint forces on the patellofemoral joint which are up to six times greater than those seen when walking on a flat surface.
Ankle joint
The ankle or talocrural joint consists of the trochlear surface of the talus and the distal ends of the tibia and fibula. The talar trochlea is wider anteriorly, and so plantarflexion is more free than dorsiflexion, average values being 30–50° and 20–30°, respectively. Marked variations occur both between individuals and following injury, and normal foot function can be achieved with as little as 20° of plantarflexion and 10° of dorsiflexion (McPoil and Brocato, 1990).
The ankle is essentially a hinge, externally rotated to between 20 and 25° with the malleoli (Fig. 7.1). In the neutral position, with the foot perpendicular to the lower leg, there is very little frontal or transverse plane motion. With dorsiflexion, abduction of the foot is possible, and during plantarflexion, adduction can occur. In dorsiflexion the broad anterior part of the talus is forced into the narrower mortice between the tibia and fibula. The interosseous and transverse tibiofibular ligaments are stressed, as the bones part slightly, and the joint moves into close pack position.
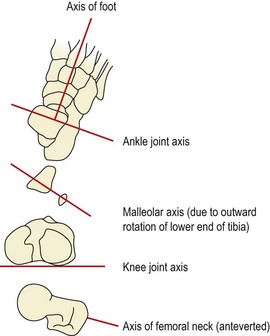
Figure 7.1 Relationship between the ankle, knee and hip joint axes.
From Palastanga, Field and Soames (1998) with permission.
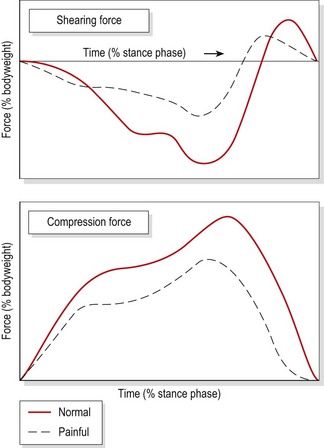
During running, the ankle is dorsiflexed at heel strike, and plantarflexes to bring the forefoot to the ground. Plantarflexion occurs again at push-off, and the foot dorsiflexes throughout the swing phase. As the speed of gait increases, the total range of motion at the ankle decreases, the range reducing by 10% when changing from a cadence of 40 strides/min to one of 60 strides/min. Joint forces at the ankle (Palastanga, Field and Soames, 1998) at heel strike are three times bodyweight for compression and 80% bodyweight for AP shear. At heel lift, muscle force creating the plantarflexion force to lift the body increase compression at the ankle to five times bodyweight (Fig. 7.2). Patients with ankle pain modify their gait pattern to reduce these forces, but in so doing stress other areas of the kinetic chain.
Subtalar joint
The subtalar joint (STJ) lies between the concave undersurface of the talus and the convex posterior portion of the upper surface of the calcaneum. The STJ is said to be in neutral position when the posterior aspect of the heel lies vertical to the supporting surface of the foot, and parallel to the lower one-third of the leg (Subotnick, 1989).
Determining neutral position of the STJ
Neutral position of the STJ is its optimal alignment and this is used as a starting point or baseline to determine foot and leg alignment faults. Neutral STJ position may be obtained in standing, supine lying and prone lying. In standing, the practitioner palpates the head of the talus on the doral aspect of the foot. The athlete then twists the trunk, forcing the tibia to internally and externally rotate. In the neutral position, the head of the navicular bone may be palpated on the medial edge of the foot. The distance between the navicular and the floor should not exceed 1 cm (Mueller, Host and Norton, 1993).
Biomechanics of the STJ
Pronation of the foot is a triplane movement of the calcaneum and foot consisting of calcaneal eversion (frontal plane), abduction (transverse plane) and dorsiflexion (sagittal plane). Supination is an opposing movement of calcaneal inversion, adduction and plantarflexion in the same planes. These are both open chain movements in their pure forms. Functionally, the movements occur in closed chain formation with the foot on the ground. Abduction and adduction cannot occur owing to friction with the floor, and dorsiflexion and plantarflexion will not occur in their pure form as they are no longer free to move. Instead, the talus takes over these movements with supination consisting of calcaneal inversion with abduction and dorsiflexion of the talus, while pronation combines calcaneal eversion with adduction and plantarflexion of the talus (Fig. 7.3).
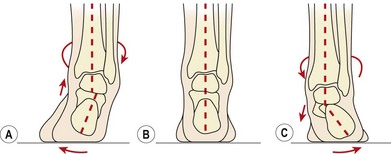
Figure 7.3 Weight-bearing motion of the sub-taloid joint. (A) Supination. (B) Neutral position. (C) Pronation.
From Gould (1990) with permission.






Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


