Walking Mechanics Following Surgical Interventions for Ankle Arthritis
Robin M. Queen
Robert J. Butler
THE BIOMECHANICS OF NORMAL WALKING
Walking gait consists of two phases known as the support phase and the recovery or nonsupport phase. During walking, one foot is at toe-off, while the contralateral foot is at heel strike, indicating that there is no flight phase during walking. A flight phase is defined as a time when both feet are off the ground at the same time as is seen during running. For approximately 0.10 seconds, both feet are in contact with the ground.1,2 During walking, the support phase accounts for approximately 60% of the stride cycle, while the swing phase accounts for approximately 40% of the stride cycle.3,4 and 5 The support or stance phase consists of the loading phase, midstance, and terminal stance, and the recovery phase consists of the follow through, forward swing, and foot descent.3,6 The loading phase, during the stance phase, is defined as the point from first foot contact, independent of the contact location, until the point of full weight bearing.6,7 This phase of gait is important for the absorption of impact forces.6,7 The center of gravity of the body reaches a maximum in the middle of the support phase at the point of single limb support.5 The swing phase begins with toe-off and is completed at foot contact. There are three phases during swing, which include initial swing, midswing, and, finally, terminal swing.8 Spatiotemporal variables are one of the best ways to assess gait mechanics in a clinical setting. The spatiotemporal variables of most interest would be step length, stride length, step width, step time, swing time, single support, and double support.
Step length is the distance between the heel of one foot and the heel of the contralateral foot during the double support phase of gait. Stride length is the distance between the heel strike of one foot and the next heel strike of the same foot. Stride width is the horizontal distance between the left and right feet during the double support phase of gait (Fig. 1.1). Stance time is the time from heel strike on one foot to toe-off of the same foot. Step time is the time from the heel of one foot and the heel of the contralateral foot during the double support phase of gait. Swing time is the time that elapses when the foot is not on the ground, from toe-off of one foot to heel strike of the same foot. Single support time is the percentage of the gait cycle when only one foot is in contact with the ground, whereas double support time is the percentage of the gait cycle when both feet are in contact with the ground and accounts for approximately 10% of the gait cycle.8 The average walking speed for adults varies by age, however; the average walking speed in adults between 50 and 70 years old is 1.3 m/s.9
At the point of foot strike, the hip is in approximately 35° of flexion and moves to approximately 5° of extension during terminal stance. The total hip range of motion in the sagittal plane during walking is approximately 45°.4 The thigh is also positioned in approximately 6° of adduction with respect to the pelvis, while the pelvis is in approximately 8° of external rotation.4 In addition, the knee is in approximately 8° to 15° of flexion, and the ankle is in an approximately neutral position to 3° of plantar flexion at heel strike.1 At initial contact, the foot is slightly supinated, and shortly after ground contact the foot begins to pronate as it reaches foot flat during midstance.10 Immediately following ground contact, the foot pronates about 10° within the first 8% of the stance phase when walking at an average speed.11 Foot mobility in pronation is necessary to make the foot more compliant so that the foot is better able to adapt to the support surface and absorb shock.12 The thigh continues to
move forward during the beginning of the support phase until it is directly over the foot, and the leg moves forward relative to the foot at the onset of midstance.3
move forward during the beginning of the support phase until it is directly over the foot, and the leg moves forward relative to the foot at the onset of midstance.3
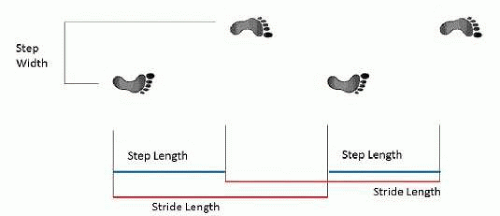 Figure 1.1. Explanation of step length, step width, and stride length during walking. |
Midstance is defined from the point of full weight bearing until the ankle begins to plantarflex and is important for the maintenance of forward momentum. During midstance, the ankle reaches between 10° and 15° of dorsiflexion at approximately the same point when the knee is flexed approximately 10°,4,13 and both the pelvis and the leg move into neutral positions. At this point, both the knee and the hip change their direction of motion and the hip extends in preparation for toeoff.13 From the point of midstance through midswing, the hip abducts approximately 6° to aid in the clearance of the swinging limb and to help with forward progression.4 The final portion of the support phase is terminal stance, which lasts from plantar flexion onset until toe-off.7 During the terminal stance phase of gait, the body will undergo forward and upward acceleration through a relative limb lengthening.6 Just prior to toe-off, the hip is maximally extended, and then it begins to flex as the foot leaves the ground.13 During terminal stance, the knee is in approximately 10° of flexion and the ankle is in approximately 10° of plantar flexion.1,13
The nonsupport or recovery phase begins immediately after toe-off. The first part of the recovery phase is known as initial swing.7 This phase is designed to slow hip extension and prepare the leg to move into knee and hip flexion as forward swing begins. By the middle of the swing phase, the knee reaches a maximum flexion of approximately 70°, while the hip achieves a maximum hip flexion of approximately 40°.4,7 Following maximum hip and knee flexion at approximately the middle of the swing phase, the hip and the knee both begin to extend in preparation for foot descent. During foot descent, forward motions of the leg and foot are slowed by the hamstrings and the knee stops approximately 10° short of full extension prior to foot strike.4
The ground reaction force (GRF) is a vector with both a magnitude and a direction that reflects the acceleration of the center of gravity of the entire body. The GRF can be decomposed into three orthogonal components: anterior-posterior, medial-lateral, and vertical. In walking, the first peak in the vertical GRF is the impact force peak, which is present during the loading response portion of the gait cycle when the Center of Pressure (COP) is positioned at the center of the heel of the shoe. The second peak is the propulsive or active peak, which occurs after foot contact when the COP is under the ball of the foot and is important for force generation to propel the body forward.5,6,14 The vertical GRF is approximately 1.1 to 1.5 times the body weight for both the weight acceptance or loading response peak and the propulsive or active peak. In addition, the vertical GRFs are fairly similar bilaterally in healthy individuals.4,14,15 The two horizontal components of the GRF, anterior-posterior and medial-lateral, are known as the shear forces. Shear forces resist any potential motion between the surface and the shoe. During walking, the anterior-posterior GRF initially has a small magnitude approximately 0.30 times the body weight and is directed anteriorly.4,5 Fairly soon following ground contact, the anterior-posterior GRF becomes a posteriorly directed breaking force of approximately the same magnitude.4,5 At midstance, the anterior-posterior GRF becomes the horizontal propulsive force.5 The medial-lateral GRF has a brief laterally directed reaction force at heel strike and then moves medially (Fig. 1.2).5 It is important to remember that the magnitudes of all components of the GRF increase with an increase in walking speed.
Related posts:






Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


