16
Biomechanical Basis for Movement
Mitchell A. Collins and Michael Hales
1. Define and apply biomechanical concepts in the description of rudimentary movement patterns.
2. Discuss the difference between the kinematics and kinetics of movement.
3. Identify and discuss the kinematic principles as related to movement in a rehabilitation setting.
4. Discuss both the linear and angular kinematics and kinetics of movement, and explain how angular motion translates to linear movements.
5. Describe the differences among the different levers, and explain the concept of mechanical advantage as related to levers.
6. Describe Newton’s laws of motion.
7. Identify and discuss the different forces that act on objects and how the forces affect movement.
8. Discuss the concepts of mechanical loading, and describe how loading is associated with different types of injuries.
9. Discuss the principles of mechanical energy.
10. Describe the concept of equilibrium and identify the factors that contribute to stability.
Biomechanics is the study of the internal and external forces acting on the body and the effects these forces produce. The data obtained from biomechanical research provide a great deal of insight into human movement interactions in fields such as physical and occupational therapy, sports medicine, human factors, prosthetics, orthotics, and ergonomics.12,31 Clinical biomechanics, a subdiscipline, provides direct measures of human motion which influence our knowledge of injury mechanics, rehabilitation, treatment, and prevention. This information can directly affect how a physical therapist assistant (PTA) rehabilitates a patient, an orthopedist repairs a broken limb or ruptured ligament, an athletic trainer implements modalities for treatment, or a clinician evaluates an individual’s gait.19,21,24
Biomechanics can provide the health professional with a better understanding and a broadened knowledge of the causes and degrees of severity associated with an injury. In order to improve upon a current rehabilitative technique, repair procedure or treatment process, the mechanics associated with the causation of the injury must be fully understood. To help the health professional accomplish this task, several factors need consideration when determining the cause and severity of an injury36:
 How much force was applied? (magnitude)
How much force was applied? (magnitude)
 Where on the body was the force applied? (location)
Where on the body was the force applied? (location)
 Where was the force directed? (direction)
Where was the force directed? (direction)
 How long was the force applied? (duration)
How long was the force applied? (duration)
 How often was the force applied? (frequency)
How often was the force applied? (frequency)
 Does the force application vary in magnitude? (variability)
Does the force application vary in magnitude? (variability)

The major role of a PTA revolves around both the causes and effects of human motion and therefore it is imperative to have a fundamental understanding of the mechanical basis for whole body or segmental movement. Since biomechanics is concerned with the effects of forces on the human body, biomechanical principles are involved when a force is present. The following chapter will offer an overview of the science of biomechanics with practical applications for the PTA.
REFERENCE TERMINOLOGY
To facilitate the process of describing human movement, standardized terminology has been adopted to identify body positions and directions of motion (Box 16-1). Movements are defined based on a reference or starting position often referred to as the anatomic position (Fig. 16-1, A), which is a standing position with arms at one’s side and palms facing forward. From the anatomic position, three imaginary cardinal planes bisect the body along three dimensions (Fig. 16-1, B). The transverse or horizontal plane segments the body into upper and lower parts; the frontal or coronal plane separates the body into front and back parts; and the sagittal or anteroposterior plane divides the body into right and left parts. It is important to note that the planes do not necessarily divide the body into equal parts. However, when the segments are equal, the mid-intersection point of the transverse, frontal, and sagittal planes is referred to as the center of mass (COM) or center of gravity (COG). Although human movement is not restricted to a single plane, most named movements (e.g., flexion and abduction) are described based on the three cardinal planes.
BOX 16-1 Basic Directional Terms Used to Describe Body Parts or Other Objects in Relation to the Body










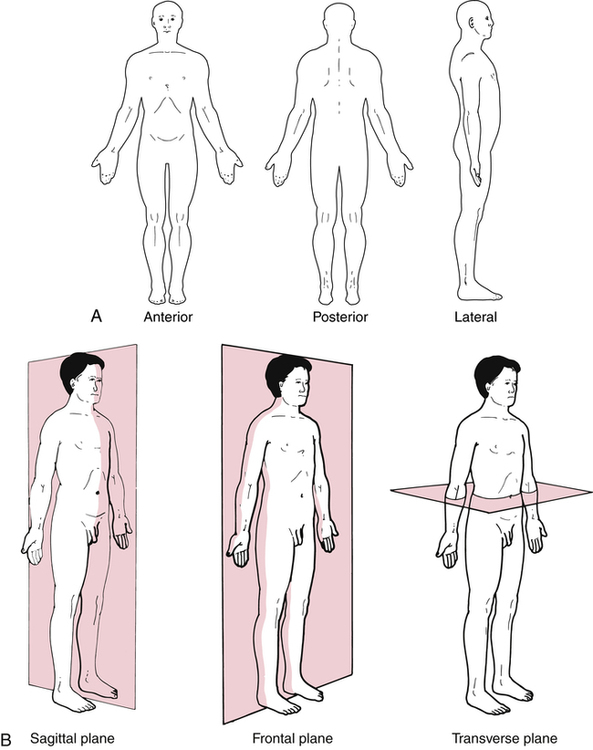
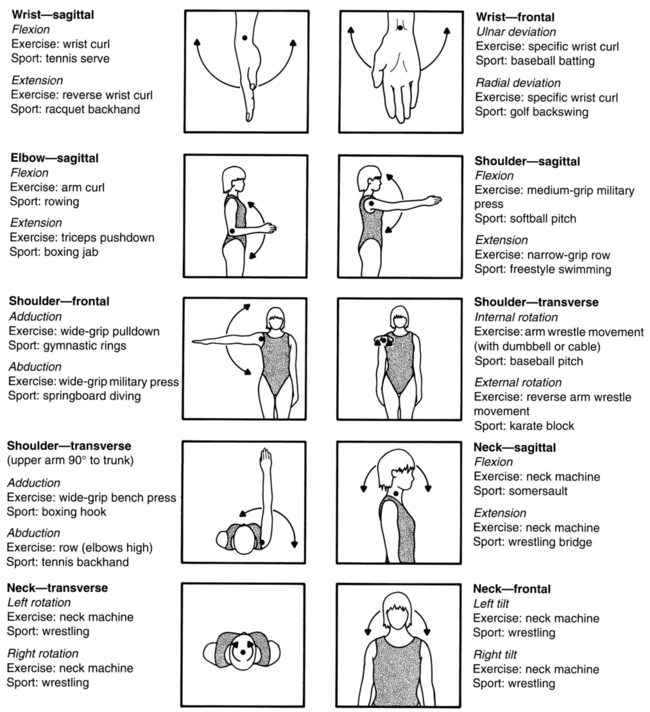
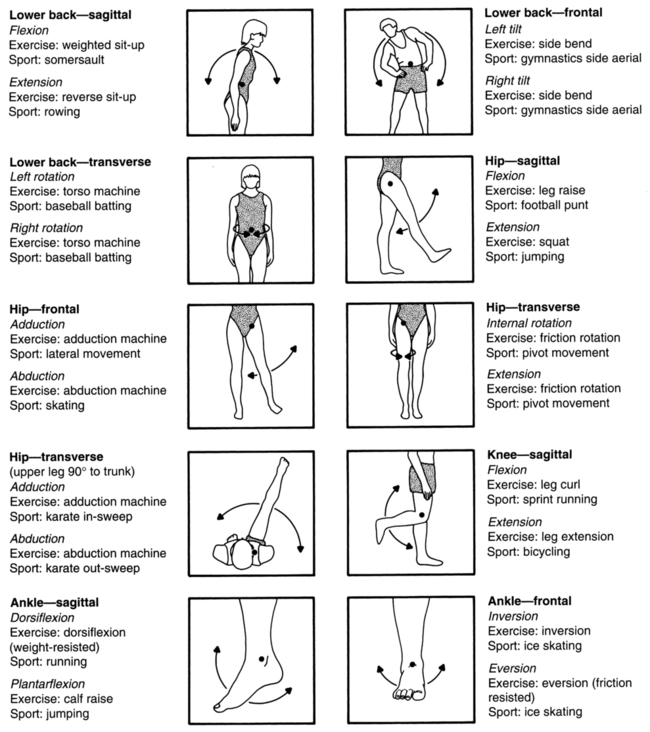
Movements in the transverse plane occur around the longitudinal axis, which runs superiorly–inferiorly while perpendicularly intersecting the transverse plane. These movements include medial and lateral rotation of the leg, thigh, and shoulder; supination and pronation of the forearm; and horizontal abduction and adduction of the shoulder. Movements in the frontal plane occur around the sagittal axis, which runs anteriorly–posteriorly while perpendicularly intersecting the frontal plane. These movements include abduction and adduction of the shoulder and hip, lateral flexion of the neck and trunk, elevation and depression of the shoulder girdle, and inversion and eversion of the foot. Movements in the sagittal plane occur around the frontal axis, which runs from left to right while perpendicularly intersecting the sagittal plane. These movements include flexion and extension of the knee, hip, trunk, elbow, shoulder, and neck; and dorsiflexion and plantar flexion of the foot as well as hyperextension movements. A key role of the PTA is to facilitate patient rehabilitation through the incorporation of various exercises using basic movement patterns. Therefore it is important to be familiar with the appropriate terminology for these movements (Fig. 16-2).
BASIC CONCEPTS
Pressure (p) is a measure of the distribution of a force over a given area (force/area), and it is expressed in newtons per meter2 (N/m2). An example of the concept of pressure in a rehabilitation setting is the development of decubitus ulcers that commonly occur among diabetics.3,32,38 Innovations in shoe design help dissipate the forces applied to the foot over a larger area (e.g., reduced pressure) during locomotion, thus minimizing soft-tissue damage and the incidence of ulceration.6,10,35
BIOMECHANICAL PRINCIPLES
Statics and Dynamics
Linear and Angular Motion
Angular motion is the measurement of rotation about an axis of a rigid lever and is quantified through the use of a polar coordinate system. This is generally represented in the human body by body segments; an example is the upper arm rotating about a joint (axis of rotation) such as the shoulder. By tracking over time how the lever, as established by its endpoints (for the upper arm these would be represented by a line connecting the shoulder and elbow), rotates around its proximal joint (the shoulder), one can determine angular positional changes of the lever, rotational velocities of the lever about the joint, and increases/decreases in rotational velocity. These angular measures describe the quality of motion generated angularly by an individual performing an activity of daily living (ADL), occupational activity, or exercise. This is important because there is a direct link between the quality of angular motion of body segments or levers and the potential for overuse injuries to the subsequent joints. For example, the faster the forearm/racket combination is rotating or extending about the elbow at the instant before impact in a tennis serve, the faster the racket is moving linearly at the moment of impact with the ball. The faster the racket head is moving linearly at impact, the greater the momentum or force imparted to the tennis ball by the athlete. Conversely, because of the high action force and moment, the greater the reaction force and moment imposed on the joints, which could lead to inflammation of the lateral epicondyle (tennis elbow) if poor service mechanics are demonstrated.22 The rotation of the forearm about the elbow is due in part to the contraction of the muscles (triceps group), which causes acceleration in the direction of elbow extension. The linear force of the triceps tendon pulling on the ulna generates a torque or rotational force. The greater the torque produced by the muscles, the greater the angular acceleration generated, leading to changes in angular velocity that lead to changes in angular position.
Kinematics and Kinetics
An understanding of kinematic principles is extremely important to PTAs. Analysis of motion can facilitate the determination of the etiology of injury, extent of damage, and assessment of the effectiveness of treatment. Historically, researchers have studied injuries in sport settings, but the same applications are pertinent to nonathletic settings, such as gait analysis of individuals with lower extremity joint injury or joint replacement.7,9,11,16,27,28 Thus it is imperative for PTAs to be knowledgeable about normal movement patterns from a kinematic perspective to facilitate the recognition of abnormal movements of rehabilitating patients.
Newton’s Laws of Motion
Newton’s first law of motion is commonly referred to as the law of inertia, which states:




Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


