Fig. 5.1
Signal flow diagram showing system components: passive robot; real-time processor; ES hardware; therapist and participant displays
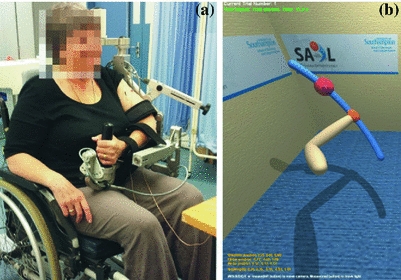
Fig. 5.2
a PwMS using mechanical support with ES applied to her left triceps and anterior deltoid muscles, b A monitor shows the trajectory task (blue) that the participant needs to follow with their arm (white) with a ball (orange) indicating they are on target for this reaching movement
Since pwMS typically experience a weakness in arm extension, ES is applied to the anterior deltoid muscle and to the triceps to assist shoulder and elbow extension respectively. The combined support and stimulated arm system is represented using the anthropomorphic model of Sect. 2.2.5. Using this model, the ES control scheme comprises the combined input-output linearizing feedback controller and feedforward ILC scheme described in Sect. 4.2. Specifically NOILC update (4.32) was used with weights Q and R chosen to balance accuracy of task completion with the amount of ES applied to assist the participant’s movement.
Following ethical approval (FoHS ETHICS-2013-5429) and written consent, five pwMS were recruited from local MS societies. Each attended one pilot, two assessment and eighteen intervention sessions with data collection performed by an experienced physiotherapist. In the pilot session the electrodes were placed on the anterior deltoid and the triceps. The pulsewidth was set at a maximum value of  and the participant gradually increased the ES amplitude applied to each muscle until they reached a comfortable level that produced movement. The pulsewidth was then reduced to zero, and the stimulation amplitudes fixed for the remainder of each session to ensure comfort and safety. The procedure of Sect. 2.2.5 was used to identify the system model used throughout the intervention. During each of the 18 one-hour intervention sessions that followed, the workspace was identified, and the stimulation levels then set. The participant then practiced a minimum of six trajectories, each repeated six times, with a rest period of 2–10 s between each attempt. The reaching tasks comprised the nine reaching movements shown in Fig. 4.2, which were scaled to fit within the workspace to ensure a safe range of practice.
and the participant gradually increased the ES amplitude applied to each muscle until they reached a comfortable level that produced movement. The pulsewidth was then reduced to zero, and the stimulation amplitudes fixed for the remainder of each session to ensure comfort and safety. The procedure of Sect. 2.2.5 was used to identify the system model used throughout the intervention. During each of the 18 one-hour intervention sessions that followed, the workspace was identified, and the stimulation levels then set. The participant then practiced a minimum of six trajectories, each repeated six times, with a rest period of 2–10 s between each attempt. The reaching tasks comprised the nine reaching movements shown in Fig. 4.2, which were scaled to fit within the workspace to ensure a safe range of practice.
and the participant gradually increased the ES amplitude applied to each muscle until they reached a comfortable level that produced movement. The pulsewidth was then reduced to zero, and the stimulation amplitudes fixed for the remainder of each session to ensure comfort and safety. The procedure of Sect. 2.2.5 was used to identify the system model used throughout the intervention. During each of the 18 one-hour intervention sessions that followed, the workspace was identified, and the stimulation levels then set. The participant then practiced a minimum of six trajectories, each repeated six times, with a rest period of 2–10 s between each attempt. The reaching tasks comprised the nine reaching movements shown in Fig. 4.2, which were scaled to fit within the workspace to ensure a safe range of practice.5.1.1 Outcome Measures
A primary outcome measure was the accuracy of unassisted task tracking over the treatment period. This was assessed by each participant tracking the same four trajectories at the beginning and end of every session, with no ES. A further primary outcome measure was the tracking performance during ES-assisted task training, and the corresponding change in amount of ES delivered over the treatment period.
Secondary outcome measures evaluated clinical changes to the upper limb and were measured in assessment sessions before treatment and within one week after the treatment period. The clinical outcome measures were: Action Research Arm Test (ARAT) [4–7]; Nine Hole Peg Test (9HPT) [7–9]; Manual Ability Measure (MAM-36) [10, 11]; and Fugl-Meyer Assessment (FMA) [7, 12–14]. Two independent physiotherapists performed the clinical assessments; the same physiotherapist performed both the pre and post assessment per participant.
The clinical outcome measures were analyzed using the Wilcoxon signed-rank test. Conforming to prior studies [15, 16], the performance of tracking with ES (assisted) and without ES (unassisted) was analyzed per participant for each of the 18 sessions by calculating best-fit linear regression slopes of performance for each task. Two-tailed t-tests were applied, and the level of significance was set at  . The 95 % confidence intervals were also calculated to provide a measure of how precisely the true mean can be bounded given the limited sample size. Tracking performance for the anterior deltoid (
. The 95 % confidence intervals were also calculated to provide a measure of how precisely the true mean can be bounded given the limited sample size. Tracking performance for the anterior deltoid ( ) and triceps (
) and triceps ( ) was normalized using
) was normalized using
A value of 100 indicated perfect tracking and 0 corresponded to no movement.
. The 95 % confidence intervals were also calculated to provide a measure of how precisely the true mean can be bounded given the limited sample size. Tracking performance for the anterior deltoid () and triceps () was normalized using(5.1)
5.2 Results
Participant characteristic data are given in Table 5.1. All participants were able to increase the number of reaching tasks practiced per session to between eight and eleven. All participants, except one, were able to receive less support from the passive robot during the reaching movements: the exception was caused by one participant’s biceps tone increasing whenever the support was reduced, so her level of support was kept constant. No serious adverse events were reported during the intervention period.
Table 5.1
Socio-demographic characteristics of participants ( )
)
)Pt Id | MS1 | MS2 | MS3 | MS4 | MS5 |
|---|---|---|---|---|---|
Age (years) | 60 | 40 | 61 | 51 | 61 |
Type of MS | SPMS | RRMS | PPMS | SPMS | SPMS |
Years MS diagnosed | 34 | 4 | 16 | 14 | 31 |
Female/Male | F | F | F | F | F |
Side treated | L | R | L | L | R |
Original dominant hand | R | R | R | R | R |
Full time wheelchair user | Y | N | Y | Y | Y |
Glasses | Y | N | Y | Y | Y |
Fig. 5.3
Assisted task tracking accuracy and amount of ES, averaged over all tasks: a tracking accuracy at the elbow; b tracking accuracy at the shoulder; c amount of ES applied at the elbow; and d amount of ES applied at the shoulder. Mean of individual slopes is shown by a dotted line
Table 5.2
Tracking performance metrics at elbow and shoulder showing the mean slope and p-value of best fit linear regression lines collapsed across participants for assisted and unassisted tasks
Task | Elbow | Shoulder | ||
|---|---|---|---|---|
Mean slope | p-value CI | Mean slope | p-value CI | |
Assisted | ||||
Tracking perf. % | 0.71 | 0.027 (0.13,1.28) | 1.31 | 0.015 (0.42,2.20) |
% maximum ES |  2.68 2.68 | 0.000 (  3.03, 3.03, 2.33) 2.33) |  2.71 2.71 | 0.000 (  3.38, 3.38, 2.04) 2.04) |
Tracking perf. %/% max ES | 0.12 | 0.000 (0.08,0.16)
Related posts:Stay updated, free articles. Join our Telegram channel
Full access? Get Clinical Tree
 Get Clinical Tree app for offline access
Get Clinical Tree app for offline access

| ||