The sit-to-stand (STS) task is a common skill of daily living and an important measure of physical function. This seemingly simple task requires adequate balance control while the base of the support changes from a relatively larger area to a smaller area supported by the feet . Inter-segmental coordination between the upper body and lower limbs controls the body’s center of mass (CoM) to maintain this required balance . Therefore, for people with functional disability, performing STS efficiently is difficult and results in poor social participation .
According to the common strategy of STS, the velocity and momentum first develop in the upper body before lift-off (LO) by using the angular velocity of the trunk forward inclination (FI) . The following ankle dorsiflexion (DF) contributes to the forward displacement of the CoM and indirectly provides horizontal momentum to the trunk . After LO, the momentum of the upper body is harnessed or transferred to the total body CoM. The angular velocity of the trunk backward inclination (BI) cooperates with the ankle plantar flexion (PF) to control this momentum and shifts the CoM upward .
For inter-segmental interaction, the ankle motions (DF and PF) around LO might be coordinated with the angular velocity of trunk motions (FI and BI). However, disabled people with insufficient coordination between the ankle and trunk use a different pattern to perform STS. Therefore, with knowledge of the typical sequence of these parameters, therapists find compensatory movement patterns, which increases the muscle effort and risk of falling.
This study aimed to determine the timing relationship between the initiation of ankle motions and the angular velocity of trunk motions during the STS task in healthy young subjects. We included 12 healthy subjects (7 males) 20 to 22 years old with no history of neuromuscular disorders. The mean height and body mass index were 166.8 ± 5.8 cm and 21.8 ± 1.7 kg/m 2 , respectively. This research study was conducted under the approval of the ethics committee of Osaka Prefecture University (2012-PT11), which complied with the Helsinki declaration. The purpose of this study was explained to all subjects, and their consent was obtained in written form.
All subjects performed the STS task in bare feet, with their arms folded across their chest. Both feet were placed symmetrically and shoulder-width apart. The task began with the subject sitting on a stool with the trunk upright and in the vertical shank position, with approximately 90° knee and ankle angle. To clarify the timing relation more strictly, STS speed was controlled by use of a metronome set at 69 beats/min as previously described . The total task time was set at 3 beats by instructing subjects to start the movement at the first beat and to stand fully upright at the third beat.
We assessed STS by using a motion analysis system (Kinema Tracer, Kissei Comtec, Matsumoto, Japan) with 4 cameras (30 Hz) synchronized by one force plate (TF-3040-A, Tec Gihan, Uji, Japan) (100 Hz). The force plate was placed beneath the stool to measure the time when the subjects lost contact with the seat. Ten reflective markers were placed bilaterally at the anatomical landmarks ( Fig. 1 ).
The sagittal angular movement and angular velocity were calculated. All these data were normalized from the beginning of STS (0%) to the endpoint of STS (100%). The beginning of STS was the time when the magnitude of the horizontal velocity at the midpoint between the acromion markers was > 5% of its peak value . The time when the magnitude of the hip extension’s angular velocity first reached 0 m/s was considered the endpoint of STS . The time when the magnitude of the vertical force on the force plate first reached its lowest point was defined as LO. STS was divided into before and after LO phases.
Regarding angular movement, data on angles that included the trunk and ankle were collected. Angular movement was defined as depicted in Fig. 1 . We then calculated the mean ± SD for total STS duration and the percentage of total task time for the kinematic events, including the initiation of angular movement of ankle motions (DF and PF), maximum angular velocity of trunk motions (FI and BI), and LO. The relationship between the initiation of ankle motions and angular velocity of trunk motions was determined in evaluating the timing of kinematic events and simple linear regression analysis was used to clarify the relationship between the angular velocity of trunk motions and the initiation of ankle motions. To illustrate the goodness of fit, R 2 values were calculated.
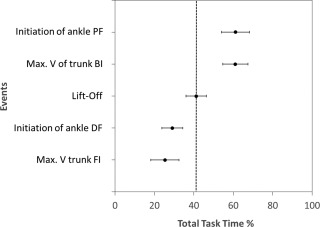
The mean total duration of STS was 1.82 ± 0.22 s. After LO, the initiation of angular movement of ankle DF occurred at approximately the same time as the maximum angular velocity of the trunk FI (25.3 ± 7.1% and 29.1 ± 5.3% time). In addition, the initiation of angular movement of ankle PF (61.0 ± 6.4% time) and maximum angular velocity of trunk BI (61.1 ± 7.1% time) occurred simultaneously after LO (41.2 ± 5.2%) ( Fig. 2 ). Percentage total time for initiation of angular movement of ankle DF and maximum angular velocity of trunk FI was linearly related; the slope of the regression line was 1.05, with R 2 > 0.60 ( Fig. 3 A ). However, the slope for initiation of angular movement of ankle PF and maximum angular velocity of trunk BI was 0.53, with R 2 < 0.60 ( Fig. 3 B).
Related posts:
 An alternative treatment for contractures of the elderly institutionalized persons: Microinvasive percutaneous needle tenotomy of the finger flexors
An alternative treatment for contractures of the elderly institutionalized persons: Microinvasive percutaneous needle tenotomy of the finger flexors
 Effect of submental sensitive transcutaneous electrical stimulation on virtual lesions of the oropharyngeal cortex
Effect of submental sensitive transcutaneous electrical stimulation on virtual lesions of the oropharyngeal cortex
 Contribution of isokinetic muscle strengthening in the rehabilitation of obese subjects
Barriers to home-based exercise program adherence with chronic low back pain: Patient expectations regarding new technologies
Intermittent catheterization in neurologic patients: Update on genitourinary tract infection and urethral trauma
Contribution of isokinetic muscle strengthening in the rehabilitation of obese subjects
Barriers to home-based exercise program adherence with chronic low back pain: Patient expectations regarding new technologies
Intermittent catheterization in neurologic patients: Update on genitourinary tract infection and urethral trauma
 Muscle strengthening for hemiparesis after stroke: A meta-analysis
Muscle strengthening for hemiparesis after stroke: A meta-analysis
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


